
-
首页
-
解决方案
- 新能源
- 光伏清洁机器人智能控制和运维解决方案
- 分布式光伏电站远程运维解决方案
- 新型储能管理系统(EMS)解决方案
- 直流电源屏在线监测解决方案
- 电力
- 成套设备在线监测物联网解决方案
- 智能开关柜整体解决方案
- 智能环网柜整体解决方案
- 真空断路器智能化解决方案
- 操作机构机械特性在线监测装置解决方案
- 母线槽智能在线监测解决方案
- 低压综保模块智能解决方案
- 工地临时配电箱在线监测物联网解决方案
- 工业控制
- AIoT智慧供热整体解决方案
- 变频器远程运维物联网解决方案
- 水泵物联网软硬件解决方案
- 科研仪器在线监测物联网解决方案
- 智能割草机远程控制物联网解决方案
- 工业缝纫机物联网解决方案
- 电梯空调远程监控物联网解决方案
- 码头卸船机远程运维物联网解决方案
- 锯床在线监测物联网解决方案
- 矿山机械远程运维物联网解决方案
-
成功案例
- 电力
- 新能源
- 工业控制
-
技术与产品
- 智能硬件
- 工业互联
- ꁇ 边缘网关
- ꁇ LoRaWAN组网
- ꁇ 电力线载波通讯模组
- 电力
- ꁇ 一键顺控装置
- ꁇ 底盘车物联网控制器
- ꁇ 机械特性监测装置
- ꁇ 低压综保控制模块
- 智能硬件
- 新能源
- ꁇ 清洁机器人控制器
- ꁇ 逆变器数据采集网关
- ꁇ 红外抄表采集装置
- ꁇ 储能EMS管理机
- ꁇ 就地显示屏
- 平台软件
- ꁇ 成套设备在线监测平台
- ꁇ 智能开关柜专家诊断系统
- ꁇ 母线槽智能在线监测平台
- ꁇ 光伏清洁机器人远程运维平台
- ꁇ 光伏电站远程运维平台
- ꁇ 新型储能管理系统EMS
- AI智能体
- ꁇ 智能画图机器人
-
新闻中心
- 公司新闻
- 行业新闻
-
关于我们
- 公司简介
- 企业荣誉
- 联系方式
- 加入我们
- 咨询服务
-
首页
-
解决方案
- 新能源
- 光伏清洁机器人智能控制和运维解决方案
- 分布式光伏电站远程运维解决方案
- 新型储能管理系统(EMS)解决方案
- 直流电源屏在线监测解决方案
- 电力
- 成套设备在线监测物联网解决方案
- 智能开关柜整体解决方案
- 智能环网柜整体解决方案
- 真空断路器智能化解决方案
- 操作机构机械特性在线监测装置解决方案
- 母线槽智能在线监测解决方案
- 低压综保模块智能解决方案
- 工地临时配电箱在线监测物联网解决方案
- 工业控制
- AIoT智慧供热整体解决方案
- 变频器远程运维物联网解决方案
- 水泵物联网软硬件解决方案
- 科研仪器在线监测物联网解决方案
- 智能割草机远程控制物联网解决方案
- 工业缝纫机物联网解决方案
- 电梯空调远程监控物联网解决方案
- 码头卸船机远程运维物联网解决方案
- 锯床在线监测物联网解决方案
- 矿山机械远程运维物联网解决方案
-
成功案例
- 电力
- 新能源
- 工业控制
-
技术与产品
- 智能硬件
- 工业互联
- ꁇ 边缘网关
- ꁇ LoRaWAN组网
- ꁇ 电力线载波通讯模组
- 电力
- ꁇ 一键顺控装置
- ꁇ 底盘车物联网控制器
- ꁇ 机械特性监测装置
- ꁇ 低压综保控制模块
- 智能硬件
- 新能源
- ꁇ 清洁机器人控制器
- ꁇ 逆变器数据采集网关
- ꁇ 红外抄表采集装置
- ꁇ 储能EMS管理机
- ꁇ 就地显示屏
- 平台软件
- ꁇ 成套设备在线监测平台
- ꁇ 智能开关柜专家诊断系统
- ꁇ 母线槽智能在线监测平台
- ꁇ 光伏清洁机器人远程运维平台
- ꁇ 光伏电站远程运维平台
- ꁇ 新型储能管理系统EMS
- AI智能体
- ꁇ 智能画图机器人
-
新闻中心
- 公司新闻
- 行业新闻
-
关于我们
- 公司简介
- 企业荣誉
- 联系方式
- 加入我们
- 咨询服务
【轨物洞见】光伏清洁机器人姿态检测及纠偏方法分析
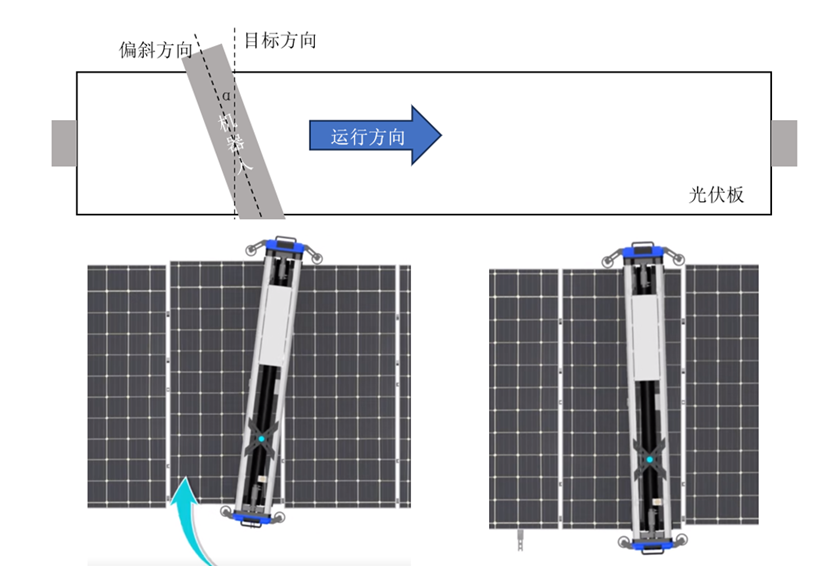
光伏清洁机器人因上下两对滚轮摩擦力不同、电机驱动可能存在微小差异等原因,机器人必定会出现上下端运行速度不一的情况,机器人就会发生倾斜,随着行走时间的增加,倾斜角度越来越大,可能会导致机器人倾斜角度过大甚至卡死,严重时还会导致机器人的电机甚至支架损坏。
光伏清洁机器人在运行过程中可能会引起偏斜的原因有多种,以下是一些常见的因素:

目前,相关企业和院校对清洁机器人运行姿态实时检测及纠偏方法已经进行深入的研究和探索,本文对相关专利进行总结,如下表所示:


通过对以上专利的分析,目前对清洁机器人的运行姿态实时检测方法有以下3种:
(1)九轴传感器
九轴传感器集成了三个主要传感器,分别是三轴陀螺仪、三轴加速度计和三轴磁力计。这种设计使得传感器能够在三个轴向上分别测量物体的角速度、磁场强度和加速度,为机器人提供了全面的姿态信息。在机器人安装时,先进行一次自校准,以获取地磁感应功能所需的垂直航向角数据,机器人在运行过程中,根据安装时获取到的数据实时调整角度。
然而,考虑到本系统运行的应用场景是跟踪支架能够控制光伏阵列的角度,以优化光伏板对阳光的收集效率,因此很可能存在两个相邻光伏阵列之间角度不同的情况。这种情况下,机器人在运行过程中,由于机器人会保留初始光伏阵列的数据,导致在下一个光伏阵列运行时存在偏斜问题。此外,九轴传感器容易受到温度、震动、磁干扰和金属等外部影响,尤其在机器人外壳为铁质的情况下更加明显。若将传感器安装在外部,机器人运行环境的恶劣性会损耗传感器。
(2)基于电阻环的主轴旋转位移检测
该方法是在光伏机器人的底盘上安装了万向轮,并设计主轴为两部分。一部分与万向轮的轴承相连,固定不动;另一部分则与机器人的底座紧密结合;这两部分通过一个轴承实现连接。当机器人发生偏斜时,这两段之间会产生旋转位移。通过电阻环的阻值大小可以判断旋转位移的大小和方向。根据阻值的变化,系统可以相应地调节电机的转速,从而实现对机器人的纠偏功能。
这种方法的优点在于其成本低廉,这主要归因于采用了简单而经济的电阻环检测旋转位移的设计。即使在机器人上电启动前处于倾斜状态,仍然能够通过系统自动纠正,这提高了机器人的稳定性和可靠性。然而,值得注意的是,这种方法的缺点也是显而易见的。首先,在机器人安装时需要进行角度设置,这增加了部署和调试的复杂性。此外,当机器人需要上桥架时,角度传感器可能会受到磁钢范围的影响而导致调速异常,从而造成偏斜。
(3)红外测距调速
红外测距是指通过红外测距传感器来检测电机左右两侧与光伏板之间的距离。当检测到的距离超出了预设范围时,系统会根据实际情况调节电机的速率,以实现机器人的自动纠偏功能。这一技术的应用使得机器人能够在工作过程中及时感知到与光伏板之间的距离变化,从而可以迅速作出相应的调整。
这种方法的优点在于其能够在机器人上电启动前,即使机器人处于倾斜状态,仍能够迅速回正,同时实现了对距离的高精度测量,能够准确地探测到电机左右两侧与光伏板之间的距离变化。然而,与此同时,该技术也存在一些挑战和局限性。首先,红外测距传感器对环境中的光线、温度和湿度等因素较为敏感,可能会受到干扰,特别是在有强烈光线或极端温度条件下,其测量精度和可靠性可能会受到影响。其次,测量范围有限,通常需要保证传感器始终可以距离光伏板侧边2~7cm。而且当光伏板侧边存在凹凸不平或传感器表面积聚灰尘时,测量数据容易出现误差,这可能会影响机器人的自动纠偏功能的准确性和稳定性。





